
Our Contribution: Real-Time 6D Scooter Detection
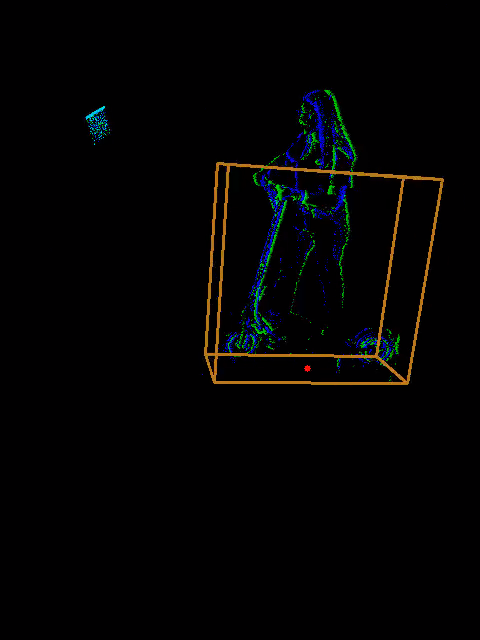
We demonstrated our 6D scooter detection system (see video), which runs in real-time on an embedded NVIDIA Jetson Nano and uses an event camera as its input sensor.
The reduced expressiveness of event data is a key advantage: it preserves the anonymity of road users while still enabling robust detection and generating timely warnings when a collision is imminent.
Trained Entirely on Synthetic Data
Our lightweight detection model was trained purely on synthetic video data, which was then converted into the event representation. This means the entire training pipeline requires no real user data whatsoever – making it privacy-preserving by design.